Rosa Mª Sánchez-Banderas
Portfolio

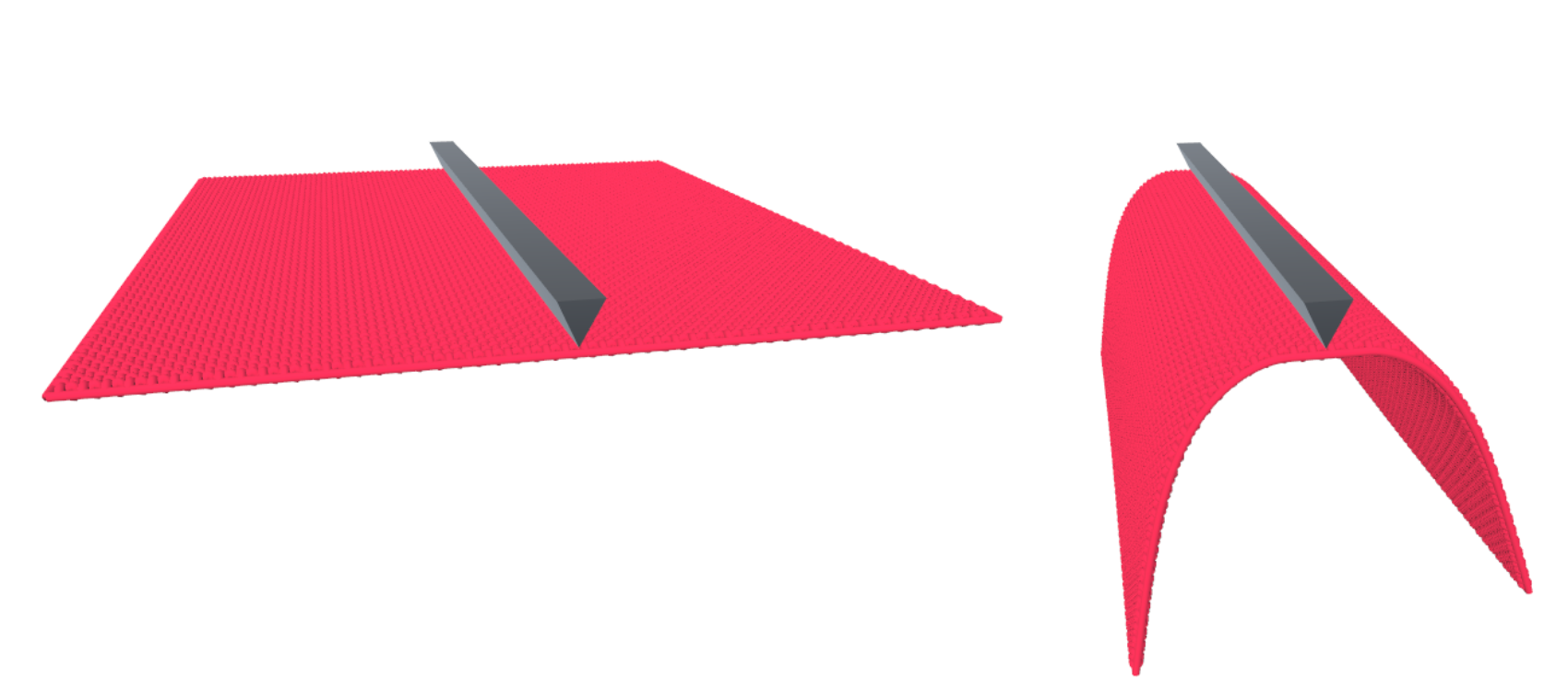
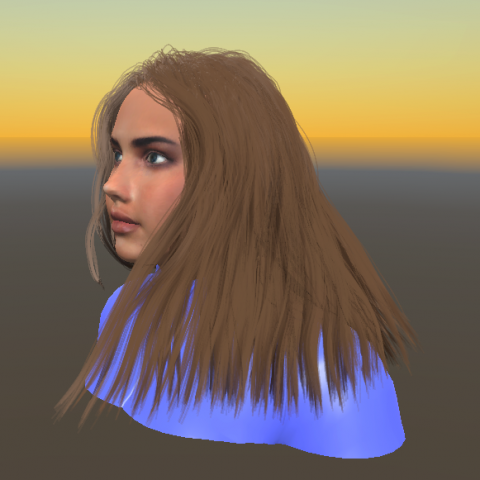
Damping determines how the energy in dynamic deformations is dissipated. The design of damping requires models where the behavior along deformation modes is easily controlled, while other motions are left unaffected. In this paper, we propose a framework for the design of damping using dissipation potentials formulated as functions of strain rate. We study simple parameterizations of the models, the application to continuum and discrete deformation models, and practical implications for implementation. We also study previous simple damping models, in particular we demonstrate limitations of Rayleigh damping. We analyze in detail the application of strain rate dissipation potentials to two highly different deformation models, StVK hyperelasticity and yarn-level cloth with sliding persistent contacts. These deformation models are representative of the range of applicability of the damping model.